
Les capteurs et les transducteurs sont des outils très importants dans la conception d’un robot. Grâce à eux, le robot peut percevoir la dimension physique de son environnement afin d’effectuer certains mouvements ou actions et prendre des mesures exactes.
Un capteur est utilisé pour modifier une gamme de courants mécaniques, magnétiques, thermiques, chimiques et électriques. Les capteurs jouent notamment un rôle important dans le domaine du contrôle du processus de fabrication dans une usine. Les capteurs fournissent l’équivalent des yeux, des oreilles, du nez, et de la langue d’une machine et sont considérés comme le cerveau du système d’automatisation dans les usines.
Quant au transducteur, c’est un dispositif qui permet de convertir de l’énergie. Les transducteurs convertissent un signal d’entrée en un signal d’énergie différente. Par exemple, ils peuvent transformer le son ou la lumière en électricité.
Classification des capteurs en robotique
Il existe deux types de capteurs, internes et externes. Les capteurs internes sont montés sur le corps du robot et sont nécessaires pour déterminer la position, la vitesse et l’accélération entre les différentes liaisons mécaniques sur et à l’intérieur du robot.
Quant aux capteurs externes, ce sont les détecteurs qui sont montés à l’extérieur du corps du robot, et qui permettent d’assurer la sécurité et le guidage du robot dans son environnement.
D’une manière générale, les capteurs peuvent être classés en trois catégories selon leur fonction et leur utilisation :
• Capteurs thermiques (chaleur)
Un capteur de température sert à détecter des symptômes caractéristiques de l’évolution de la température dans un espace ou une dimension spécifique. Ce genre de capteurs inclut les thermistances, les thermocouples, les phototransistors, les photodiodes, les photomultiplicateurs (tube qui détecte les photons), les hygromètres (servant à mesurer l’humidité), les pyromètres infrarouge (mieux connus sous le nom de thermomètres laser), etc.
• Capteurs mécaniques
Un capteur mécanique détecte les changements de mouvement mécanique, tels que le déplacement ou le changement de position, le mouvement rectiligne et circulaire, la pression, le débit, le niveau, etc. Par exemple, le potentiomètre sert notamment à contrôler le volume sur une radio, le Tube de Bourdon mesure la pression, etc.
• Capteurs optiques (lumière)
Un capteur optique ou de lumière détecte les variations de lumière provenant de la source lumineuse, la réflexion de la lumière ou sa réfraction lorsqu’elle touche un objet. Parmi les exemples, on peut citer la cellule photoélectrique (mesurant une intensité lumineuse), le photo-transistor, la photodiode (qui détecte la rayonnement optique), le photomultiplicateur, et le pyromètre infrarouge (mesurant la température d’un objet à distance).
Classification des transducteurs
Les transducteurs peuvent être divisés en deux catégories générales :
• Transducteurs auto-générateurs
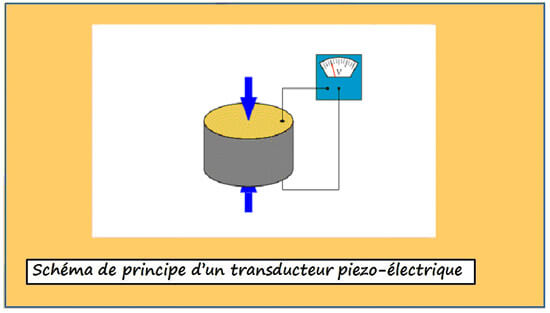
Le transducteur auto-générateur ne nécessite qu’une seule source d’énergie, comme par exemple les transducteurs piezo-électriques, le thermocouple, le thermistance, etc. Ce transducteur produit lui-même sa propre énergie électrique et agit comme une source de tension.
{kind=link}
• Transducteurs à alimentation externe
Ce type de transducteur est passif et nécessite de l’énergie venant de l’extérieur pour produire un signal. Il se trouve par exemple dans les thermomètres à résistance de platine, qui permettent de mesurer les températures de manière très précise sur un large plage grâce à leur grande résistance. Le linear variable differential transformers ou LVDT, qui permet de capter une position et transmettre des mesures d’une manière extrêmement précise, est un autre exemple de transducteur à alimentation externe.
Tous ces capteurs sont utilisés dans des domaines d’application industrielle, agricoles, spatiales et militaires, mais certains sont tout aussi utiles pour votre projet de robot DIY ou pour des compétitions d’amateurs.